飛控版部分
感測飛行器的傾斜,接收、輸出馬達的控制訊號都是飛控版的工作,不過如果目標功能不是很複雜的話,上面的元件其實也不會很多
這裏只介紹零件,因為我焊接的技術真的是很爛,假如不會焊接的可以Google找到更好的教學XD
這裏的零件耗材假如家裡附近有電子材料就可以很方便買到,假如是網購的話,盡量力求一次買齊,不然被收很多次運費累積下來也是滿驚人的,模組的部分就盡量網購,除非剛好型號有對又比較便宜才在實體店面買
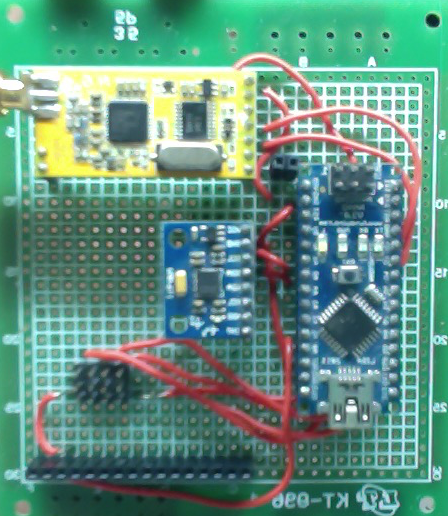
在這張圖中,右邊的長條版是Arduino,中間那塊小塊的是GY-521,上面那塊是APC220
Arduino Nano開發版(or Micro)
大名鼎鼎的Arduino就是在說這塊,這在高職和許多創客教學上也很火紅,所有飛控的程式就是寫在這裡面執行,Arduino有許多不同的版本,像Uno, Mega 2560, Pro mini, Micro等等,會有不同的處理器規格和針腳數目,也有其他的公司會依照Arduino開源的電路圖做出他們自己的相容版,例如funduino等等,有時在功能上做一些增刪,通常會比原廠版便宜很多,也可以使用。我之前用的是由funduino做的Arduino Nano相容板,現在這開發版已經停產了,相對應的新版叫做Arduino Micro,有一些腳位上的升級。在挑選上Mega 2560是效能最強、針腳數目最多的,不過相對也比較貴、體積也比較大,假如預算足夠而且清楚機身空間如何規劃的可以考慮,在體積方面最小的是Pro mini,不過要注意這款沒有內建和USB的轉換器,還要自己另外焊線,手工夠細緻的人可以用這款。不知道怎麼選的照我經驗用Micro應該會是最方便的,我們主要的任務在寫程式,不是挑板子,只要沒買到假貨應該都能放心買來用
APC220 RF傳輸模組
無線模組的用途就是用來和Arduino傳輸資料進而用來遙控的,主要分幾種:一種是很便宜的RF模組,一組<=200元那種,長得有點像鐵捲門遙控器拆開那個樣子,頻率通常固定不能調,這個我在Arduino上沒有試成功,而且傳輸速度是個問號;第二種是數據傳輸用的RF模組,通常這種模組支援一些設定指令,可以從電腦(甚至微處理器)更改頻率、頻道、鮑率等等的參數,諸如APC220,nRF24L01這類的都是,我用的是APC220,1000元上下兩隻一組;第三種是和Arduino這類產品整合特別好的模組,像XBee或一些藍芽模組,這種模組的生產公司對特定微處理器的資料都比較完整,設計上也會考量微處理器省電之類的目標,甚至會內建通訊協定,使和他同頻率的裝置也不容易干擾,不過明顯的缺點就是會比前兩種貴滿多,我假如有錢,應該能幫大家試試看好不好用XD
在通訊方法上,微處理器和感測器、資料傳輸模組的溝通方式無非三種:UART、SPI、和I2C,無線傳輸模組通常採用前兩者其中一種,托Arduino在UART訊號轉換上將其開發的極其易用,他算是目前最簡便的方法;SPI則是傳輸速度較快,不過接線也較多;第三種接線少但傳輸邏輯複雜、速度稍慢且不支援雙工,通常用於感測器中
GY-521 加速度+陀螺儀感測器
GY-521是模組的名稱,中間那顆IC的名字叫MPU6050,是一顆加速度三軸+陀螺儀三軸的感測器,其中加速度計可以測出三個軸向中所受的加速度的方向(假如靜止,就是只受重力),陀螺儀則可以偵測角速度,用他們就能夠計算出飛行器姿態。以前這些感測器都是分開的,需要自己去研究I2C的串接,整合在一起不只是開發方便,還會比較省電省空間,現在還有新的9050,9150等等型號,功能類似,不過多了三軸的電子指南針,可以偵測磁場方向。這類模組通常將感測資料用I2C或SPI協定傳輸,雖然這些協定的通訊方法有些複雜,不過在Arduino上已經有現成的函式庫可以用了,不需要太擔心
耗材+工具
這種東西就是有點重要又不太重要,不過在需要的時候沒有就會很想打人,主要工具有:
- 烙鐵
- 焊接架
- 麵包板(做實驗用)
- 杜邦線&跳線
- 吸錫器or吸錫線
耗材則有:
- 焊錫
- 單芯線
- 備用的空電路板
- 排針和排母
基本上這些東西假如平常有在玩焊電路板的都不會太陌生,沒有在玩的快去買來玩,就算不做四軸,也是能做出很多好玩的東西的XD